Synchronous and Asynchronous cEA
A classification on sequential cEAs can be made in terms of whether the whole population is actualized by the new one at the same time or not. The cEAs of the first case are called synchronous, while those belonging to the later case are asynchronous.
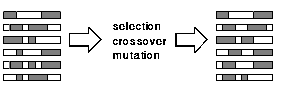
In generational or synchronous cEA, the whole old population is replaced simultaneously by the offspring population at the end of each generation. We can achieve this by computing the full new generation incrementally onto a temporary population, and then replace the full old population with the new one. In Figure 1 we can see how does synchronous cEA work:
|
| Figure 1. Synchronous cEA |
In the case of asynchronous algorithms, the individuals of the population are replaced by theirs offspring sequentially during the generation just after being created. Hence, in this asynchronous cEAs we do not have to wait all the individuals to reproduce for replacing the old individuals of the population with the new ones. This way, one individual can match with the offspring of his neighbors to reproduce (see Figure 2).
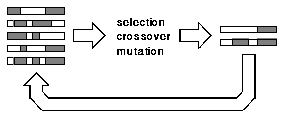 |
| Figure 2. Asynchronous cEA |
There are many ways for sequentially updating the cells of a cEA with a population structured in a 2D grid [SR99]. Here we will consider the following [AGTR02]:
 ,
line by line of the 2D grid.
,
line by line of the 2D grid. ,
where
,
where  means that cell number p is updated at time q
and
means that cell number p is updated at time q
and  is a permutation of the n cells. The same permutation
is then used for the following update cycles.
is a permutation of the n cells. The same permutation
is then used for the following update cycles. A time step must be defined to be the action of updating n times, which corresponds to updating all the n cells in the grid for LS, FRS and NRS, and possibly less than n different cells in the uniform choice method, since some cells might be updated more than once. It should be noted that, with the exception of fixed line sweep, the other asynchronous updating policies are non-deterministic, representing an additional source of non-determinism besides that of the genetic operators. An asynchronous parallel implementation could be easily derived for these algorithms.
Synchronous vs. asynchronous cEAs
In Figure 1 we display the mean number of evaluations needed for all the algorithms described above to solve three different problems: a multimodal and deceptive (MMDP), a highly epistatic (P-PEAKS), and an irregular one with continuous optimization (FMS) one [AGTR02].
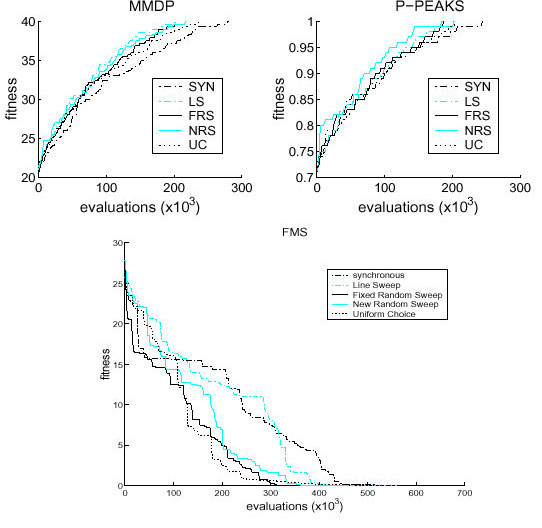 |
| Figure 3. A sample run of each update method for the MMDP, P-PEAKS, and for the FMS problem. |
In Figure 4 we display a graph of the evolution of the diversity (Entropy) for MMTP and P-PEAKS problems [AGTR02].
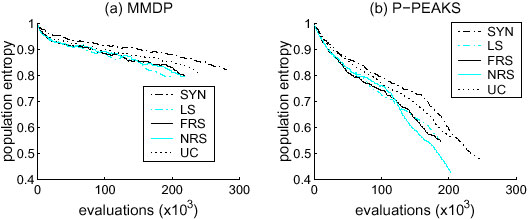 |
| Figure 4. A sample curve of the entropy of each update method for the MMDP (a) and for the P-PEAKS problem (b). |
Alba et al. concluded in [AGTR02] that, for any size of the search grid, the synchronous update policy is the best in terms of percentage of hits, because it always provides an equal or larger success rate with respect to any of the asynchronous policies.
However, considering the number of evaluations needed to locate the optimum (efficiency) the opposite conclusion is obtained: asynchronous methods are faster (sometimes much faster) than the synchronous one. A simple asynchronous policy such that Line Sweep (LS) provides the faster convergence for two of the problems (MMDP and P-PEAKS), while it shows a high and desirable success rate (similar to that of the synchronous update). In the hard FMS problem, Fixed Random Sweep got a considerably faster solution, and can be pointed out as a good approach.
Globally stated, fast convergence means getting stuck in local optima in evolutionary algorithms, but cellular EAs in general, and the Line Sweep policy in particular, offers a good tradeoff solution to this problem without bothering researchers with a large number of parameters to be tuned (maybe only the ratio between the size of the grid and the neighborhood being used [AT00]).